(1)《量子力学与统计力学》-卢文发,配套视频
(2) 知乎-如果你来讲《理论力学》课程,你会如何设计?
(3) 经典力学新讲—陈童
(4) 理论力学—刘川
(5) 北京师范大学-涂展春-理论力学-PPT
泛函和欧拉-拉格朗日方程初探
泛函(functional)通常是指定义域为函数集,而值域为实数或者复数的映射,换句话说,它是从函数组成的一个向量空间到标量域的映射,它的输入为函数,而输出为标量。
泛函和函数、算子的概念区别:
(1) 算子是一个函数到另一个函数的映射,它是从向量空间到向量空间的映射。
(2) 泛函是从向量空间到数域的映射。
(3) 函数是从数域到数域的映射。
例子:二维平面空间,从坐标原点到点\((a,b)\)的连接曲线是\( y=y(x)\),曲线的弧长微元是\(d s=\sqrt{1+(\displaystyle \frac{d y}{d x})^{2}} d x\),曲线的总弧长是\(s=\displaystyle \int_{0}^{a}(1+y^{\prime 2})^{1 / 2} d x\),其中\( s\)是标量,该式右边是\(y^{\prime}(x)\)的广义函数,被称为泛函,可记为\(s(y^{\prime})\)。
问题就变成了:找出曲线\( y=y(x)\),使得泛函\(s(y^{\prime})\)最小。这个问题可以用变分法求解。
欧拉-拉格朗日方程为变分法中的一条重要方程。它是一个二阶偏微分方程。它提供了求泛函的临界值(平稳值)函数,换句话说也就是求此泛函在其定义域的临界点的一个方法,与微积分差异的地方在于,泛函的定义域为函数空间而不是\( \mathbb{R}^{n}\)。
维基百科的定义在此,在忽略数学的严谨性下,我们可以将其写成最简单的如下形式$$\frac{\partial L}{\partial f}-\frac{d}{d x}\left(\frac{\partial L}{\partial f^{\prime}}\right)=0$$其中的\( L = f(x,f,f^{\prime})\)。
比如在分析力学中,对一般经典物理系统,拉格朗日量\(\mathcal{L}=T-V\) ,即动能减去势能。假设已知一个系统的拉格朗日量,则可以将拉格朗日量直接代入欧拉-拉格朗日方程,稍加运算,即可求得此系统的运动方程。
在高中阶段我们已经接触过很多单自由度谐振动系统,比如小角单摆,弹簧振子,LC振荡电路等等,它们的方程都是 \(\ddot{q}+\omega^{2} q=0 \)的形式。事实上,多自由度系统,例如晶格振动,耦合振荡电路等等,它们的方程也有类似的形式。下面我们以一些例子作为引导研究它们的运动方程。
一个简单的无阻尼弹簧振子:\(m \ddot{x}+k x=0\),解得\(x=A e^{i(\omega t+\varphi)} \),其中振动频率\(\omega=\sqrt{\displaystyle\frac{k}{m}}\),事实上谐振动随时演化关系是实函数,因为没有一个位置会是虚数。所以严格地说,应为解函数的实部。
考虑一个双自由度耦合振子,两物体被三个弹簧限制在一水平面上,作一维运动。(参考双自由度耦合振子模型。)

动能:\(T=\displaystyle\frac{1}{2} m_{1} \dot{x}_{1}^{2}+\frac{1}{2} m_{2} \dot{x}_{2}^{2}\)
势能:\( V=\displaystyle\frac{1}{2} k_{1} x_{1}^{2}+\frac{1}{2} k_{2}\left(x_{1}-x_{2}\right)^{2}+\frac{1}{2} k_{3} x_{2}^{2}\)
于是得到拉格朗日量:$$\begin{aligned} &\mathcal{L}=T-V \\ &=\frac{1}{2} m_{1} \dot{x}_{1}^{2}+\frac{1}{2} m_{2} \dot{x}_{2}^{2}-\frac{1}{2} k_{1} x_{1}^{2}-\frac{1}{2} k_{2}\left(x_{1}-x_{2}\right)^{2}-\frac{1}{2} k_{3} x_{2}^{2} \end{aligned}$$带入欧拉-拉格朗日方程:\(\frac{\partial \mathcal{L}}{\partial x_{i}}=\frac{\mathrm{d}}{\mathrm{d} t} \frac{\partial \mathcal{L}}{\partial \dot{x}_{1}} \quad(i=1,2)\),得到$$\begin{aligned} &-k_{1} x_{1}-k_{2}\left(x_{1}-x_{2}\right)=m_{1} \ddot{x}_{1} \\ &k_{2}\left(x_{1}-x_{2}\right)-k_{3} x_{2}=m_{2} \ddot{x}_{2} \end{aligned}$$分离出\( x_1\),\( x_2\),写成矩阵的形式有:$$\left[\begin{array}{cc} m_{1} & 0 \\ 0 & m_{2} \end{array}\right]\left[\begin{array}{c} \ddot{x}_{1} \\ \ddot{x}_{2} \end{array}\right]=\left[\begin{array}{cc} -k_{1}-k_{2} & k_{2} \\ k_{2} & -k_{2}-k_{3} \end{array}\right]\left[\begin{array}{c} x_{1} \\ x_{2} \end{array}\right]$$将上面的动力学方程简写成\(\mathbf{M} \ddot{\mathbf{x}}+\mathbf{K} \mathbf{x}=0 \)
再参考一下三个自由度的情况:
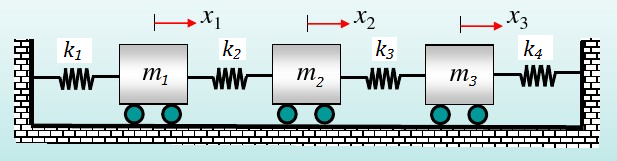 同样可以写成矩阵的形式:$$\left[\begin{array}{ccc} m_{1} & 0 & 0 \\ 0 & m_{2} & 0 \\ 0 & 0 & m_{3} \end{array}\right]\left[\begin{array}{l} \ddot{x}_{1} \\ \ddot{x}_{2} \\ \ddot{x}_{3} \end{array}\right]=\left[\begin{array}{ccc} -k_{1}-k_{2} & k_{2} & 0 \\ k_{2} & -k_{2}-k_{3} & k_{3} \\ 0 & k_{3} & -k_{3}-k_{4} \end{array}\right]\left[\begin{array}{l} x_{1} \\ x_{2} \\ x_{3} \end{array}\right]$$事实上,在这个形式的系统中,无论有多少个物体,即无论有多少个自由度,都可以用\(\mathbf{M} \ddot{\mathbf{x}}+\mathbf{K} \mathbf{x}=0\)来描述系统的运动。
同样可以写成矩阵的形式:$$\left[\begin{array}{ccc} m_{1} & 0 & 0 \\ 0 & m_{2} & 0 \\ 0 & 0 & m_{3} \end{array}\right]\left[\begin{array}{l} \ddot{x}_{1} \\ \ddot{x}_{2} \\ \ddot{x}_{3} \end{array}\right]=\left[\begin{array}{ccc} -k_{1}-k_{2} & k_{2} & 0 \\ k_{2} & -k_{2}-k_{3} & k_{3} \\ 0 & k_{3} & -k_{3}-k_{4} \end{array}\right]\left[\begin{array}{l} x_{1} \\ x_{2} \\ x_{3} \end{array}\right]$$事实上,在这个形式的系统中,无论有多少个物体,即无论有多少个自由度,都可以用\(\mathbf{M} \ddot{\mathbf{x}}+\mathbf{K} \mathbf{x}=0\)来描述系统的运动。
在振动力学中,\( \mathbf{M}\)称为质量矩阵,在这个系统中它具有以下形式:$$\mathbf{M}=\left[\begin{array}{ccccc} m_{1} & 0 & 0 & \cdots & 0 \\ 0 & m_{2} & 0 & \cdots & 0 \\ 0 & 0 & m_{3} & \cdots & 0 \\ \vdots & \vdots & \vdots & \ddots & \vdots \\ 0 & 0 & 0 & \cdots & m_{n} \end{array}\right]$$\(\mathbf{K}\)称为刚度矩阵,它具有以下形式:$$\mathbf{K}=\left[\begin{array}{ccccc} k_{1}+k_{2} & -k_{2} & 0 & \cdots & 0 \\ -k_{2} & k_{2}+k_{3} & -k_{3} & \cdots & 0 \\ 0 & -k_{3} & k_{3}+k_{4} & \cdots & 0 \\ \vdots & \vdots & \vdots & \ddots & \vdots \\ 0 & 0 & 0 & \cdots & k_{n}+k_{n+1} \end{array}\right]$$位移向量和加速度向量为$$\mathbf{x}=\left[\begin{array}{c} x_{1} \\ x_{2} \\ x_{3} \\ \vdots \\ x_{n} \end{array}\right], \ddot{\mathbf{x}}=\left[\begin{array}{c} \ddot{x}_{1} \\ \ddot{x}_{2} \\ \ddot{x}_{3} \\ \vdots \\ \ddot{x}_{n} \end{array}\right]$$事实上,在一般情况下这个系统的运动方程为$$\mathbf{M} \ddot{\mathbf{x}}+\mathbf{C} \dot{\mathbf{x}}+\mathbf{K x}=0$$这里的\( \text { C }\)是阻尼矩阵,我们暂时不考虑。
关于如何求解,可以参考知乎作者的内容,或者我的MIT-微分方程-3以及线性代数的内容。总之解函数可以写成$$\mathbf{x}=A e^{i\left(\omega_{A} t+\varphi_{A}\right)} \hat{\mathbf{x}}_{\mathbf{A}}+B e^{i\left(\omega_{B} t+\varphi_{B}\right)} \hat{\mathbf{x}}_{\mathrm{B}}+C e^{i\left(\omega_{C} t+\varphi_{C}\right)} \hat{\mathbf{x}}_{\mathbf{C}}$$
于是,我们将系统的运动方式拆分成了三种运动模式的叠加,并且这三个模式是相互独立的。如果系统处在且仅处在这三个模式(这三个解)的任意一个中,系统将以某个特定的频率和某种特定的模式振动(例如共振)下去,并且,系统会很和谐地维持这个运动状态,在任何时候都不会掺杂其他两种模式的任何一点成分。于是乎,这个系统将变得很好处理,这也就是我们这么设出这个解的理由。
在这里,我们叫这个特定的频率为系统的简正频率,我们叫这个特定的振动模式为这个系统的简正模,坐标 \( x_{A}, x_{B}, x_{C}\)为这个系统的简正坐标,系统的运动就是三个简正坐标在简正模下的线性组合。
参考:
(1) 寻找“最好”(2)——欧拉-拉格朗日方程
(2) 寻找“最好”(3)——函数和泛函的拉格朗日乘数法
(2)【直观解释】欧拉-拉格朗日方程(拉格朗日力学)
(3) MIT-微分方程-3
(4) MIT-线性代数
(5) 量子力学-格里菲斯-定态薛定谔方程
自由度数、约束和广义坐标
描述机械运动的关键在于确定体系的位形,因而牛顿力学采用符合人类直观感受的位置坐标,但是这种方法并不总是最方便的,因此,分析力学将之推广为广义坐标。接下来先介绍体系的自由度数,然后简介约束概念,最后引入广义坐标。
力学系统的自由度
(1) 单粒子:在三维空间中运动完全不受任何限制,那么在任意时刻\(t\)的位置可以用三个独立的参数来表示(自由度数为3),可采用直角坐标、球坐标、柱坐标。
单粒子运动受限制的四种特例:
(a) 当粒子被限制在某个给定平面中,自由度数为2;
(b) 被限制在某个给定的半径为\(R\)的球面上,自由度数为2;
(c) 被限制在某条给定的直线上,自由度数为1;
(d) 被限制在给定的半径为\(R\)的圆环上,自由度数为1。
(2) 两粒子体系:
- 如果都在三维不受限制地运动,显然自由度为6,可以用六个坐标值确定其位形;
- 若两粒子间的距离恒定(刚性双原子分子),自由度数为5;
- 刚性两粒子系统质心恒定(自由转子),自由度数为2;
- 刚性两粒子系统做定轴转动(平面转子),自由度数为1;
(3) 三粒子体系:
- 如果都在三维不受限制地运动,显然自由度为9;
- 若不共线三粒子两两距离恒定,自由度为6;$$\begin{aligned} &\left(x_{2}-x_{1}\right)^{2}+\left(y_{2}-y_{1}\right)^{2}+\left(z_{2}-z_{1}\right)^{2}=r_{12}^{2} \\ &\left(x_{3}-x_{2}\right)^{2}+\left(y_{3}-y_{2}\right)^{2}+\left(z_{3}-z_{2}\right)^{2}=r_{23}^{2} \\ &\left(x_{1}-x_{3}\right)^{2}+\left(y_{1}-y_{3}\right)^{2}+\left(z_{1}-z_{3}\right)^{2}=r_{31}^{2} \end{aligned}$$
(4) N粒子体系:三维空间自由运动,需要\(3N\)个坐标值确定其位形,自由度为\(3N\);
(5) 刚体:自由度数为 6 ,其位形由刚体中任意不共线三粒子的位置所完全确定。
质点或物体运动的自由度和其周围环境有关。
约束:指对一个系统中质点运动的限制。前面讨论的自由度时所涉及到的平面、球面、直线、粒子间距离恒定等对所讨论系统的运动就存在约束。
约束条件:越是往往可用刻画系统中质点运动状态的物理量所满足的数学关系式来描述,即约束可表示为该系统中质点的位矢、速度和时间所满足的数学关系式。比如在固定球面上运动的粒子,在圆环上静止或运动的质点。
一般地,若系统受到\(k\)个约束,则相应的有\(k\)个约束条件:$$f_{\beta}\left(\boldsymbol{r}_{1}, \boldsymbol{r}_{2}, \cdots, \boldsymbol{r}_{N} ; \dot{\boldsymbol{r}}_{1}, \dot{\boldsymbol{r}}_{2}, \cdots, \dot{\boldsymbol{r}}_{N} ; t\right) \geqslant 0, \quad \beta=1,2,3, \cdots, k, \quad \boldsymbol{r}_{i}=\left(x_{i}, y_{i}, z_{i}\right)$$这里的\(f \)是标量函数,符号上方的原点表示对时间的一阶导数,不等式取等号时,称约束条件为约束方程。
约束的分类:
稳定约束:约束不随时间变化;
不稳定约束:约束随时间变化。
几何约束:约束仅为位置坐标和时间的函数;
运动约束:既限制质点的位置,也限制质点的速度。
可解约束:不等式的约束,如软绳;
不可解约束:等式约束。
完整约束:不可解几何约束及可化为不可解几何约束的运动约束,比如纯滚动(只滚不滑)条件\( \dot{x}-R \dot{\theta}=0\)等价于\(x-R \theta=0\)(积分后的结果),其中\( C\)为常数,即运动约束转化为几何约束;
非完整约束:可解几何约束及可不能化为不可解几何约束的运动约束;
若系统仅受到如下\(k\)个完整约束,其一般形式为$$f_{\beta}\left(\boldsymbol{r}_{1}, \boldsymbol{r}_{2}, \cdots, \boldsymbol{r}_{N} ; t\right)=0 \quad \beta=1,2,3, \cdots, k$$约束的存在导致系统自由度数的减少。若一个由\(N\)个粒子组成的完整系受到上式的所描述的\( k\)个约束,则其自由度数为\( s = 3N-k \)。
力学系统的分类:
完整系:仅受有完整约束的力学体系;(无约束系统是完整系)
非完整系:受有非完整约束的力学体系。
本课程仅讨论完整系!
确定仅存在\(k\)个约束的\(N\)粒子完整系的位形只需要\(s=3N-k\)个独立坐标。其实可以不用直角坐标而用其他独立参量来确定体系的位形,只要能科学地方便地把体系在不同时刻的位形确定下来即可。
广义坐标:决定一个力学体系在空间的位形的独立参量叫作该系统的拉格朗日广义坐标。一个完整系的广义坐标数目与其自由度数相同;对于非完整系,自由度数可能小于广义坐标数。
广义坐标可以任意选取,一般以简单、方便和有意义为原则。它可以是长度、角度或其它量,比如面积、体积、电极化强度、磁化强度等。广义坐标可以是直角坐标、球坐标、柱坐标等。
对于受\(k\)个完整约束的\(N\)个粒子体系,可引入\(s=3N-k\)个彼此完全独立的参量\(q_{\alpha}, \alpha=1,2, \cdots, s\)确定其位形。即,\(N\)粒子体系的\(3N\)个直角坐标\(x_{i}, y_{i}, z_{i}, i=1,2, \cdots, N\)或\(N\)个位矢\( \boldsymbol{r}_{i}=\left(x_{i}, y_{i}, z_{i}\right)\)可表示为$$\left.\begin{array}{l} x_{i}=x_{i}\left(q_{1}, q_{2}, \cdots, q_{s}, t\right) \\ y_{i}=y_{i}\left(q_{1}, q_{2}, \cdots, q_{s}, t\right) \\ z_{i}=z_{i}\left(q_{1}, q_{2}, \cdots, q_{s}, t\right) \end{array}\right\}, \quad i=1,2, \cdots, N ; \quad s=(3 N-k) \leqslant 3 N$$或表示为$$\boldsymbol{r}_{i}=x_{i} \boldsymbol{e}_{x}+y_{i} \boldsymbol{e}_{y}+z_{i} \boldsymbol{e}_{z}=\boldsymbol{r}_{i}\left(q_{1}, q_{2}, \cdots, q_{s}, t\right), \quad i=1,2, \cdots, N ; \quad s \leqslant 3 N$$其中\( \left\{x_{i}, y_{i}, z_{i}\right\}\)应满足(\( k\)个约束方程)$$f_{\beta}\left(x_{1}, x_{2}, \cdots, x_{N} ; y_{1}, y_{2}, \cdots, y_{N} ; z_{1}, z_{2}, \cdots, z_{N} ; t\right)=0, \quad \beta=1,2,3, \cdots, k$$注:如果是稳定约束,位矢的广义坐标表达式中不含显时间\( t \)。
对于完整系,一旦选定一套广义坐标,则体系在任一时刻的位形就可以用这套广义坐标的取值来确定,即由方程组$$q_{\alpha}=q_{\alpha}(t), \quad \alpha=1,2, \cdots, \quad s \leqslant 3 N$$完全确定。广义坐标对时间的导数$$\dot{q}_{\alpha}=\frac{\mathrm{d} q_{\alpha}}{\mathrm{d} t}=\dot{q}_{\alpha}(t), \quad \alpha=1,2, \cdots, \quad s \leqslant 3 \mathrm{~N}$$叫作广义速度。体系中各粒子在任意时刻的速度可由该时刻的广义坐标和广义速度完全确定,即各粒子在\(t \)时刻的速度可表示为$$\dot{\boldsymbol{r}}_{i}=\dot{\boldsymbol{r}}_{i}\left(q_{1}, q_{2}, \cdots, q_{s} ; \dot{q}_{1}, \dot{q}_{2}, \cdots, \dot{q}_{s} ; t\right), \quad i=1,2, \cdots, N ; \quad s \leqslant 3 N$$因此,由方程组\(q_{\alpha}=q_{\alpha}(t)\)可给出该完整系在任意时刻的位形和各粒子的运动速度,它包含了体系如何运动的全部信息,是完整系的运动学方程。
量子力学中,知道了位置算符和动量算符,那么其他的和运动有关的算符都可以用这两个算符来表示出来;这里也类似,知道了广义坐标和广义速度,那么和运动有关的所有数据都可以用这两个东西来表示出来。
第\(i\)个粒子在\(t\)时刻的速度式可以表达为$$\dot{\boldsymbol{r}}_{i}=\frac{\mathrm{d} \boldsymbol{r}_{i}}{\mathrm{~d} t}=\frac{\partial \boldsymbol{r}_{i}}{\partial q_{1}} \frac{\mathrm{d} q_{1}}{\mathrm{~d} t}+\cdots+\frac{\partial \boldsymbol{r}_{i}}{\partial q_{s}} \frac{\mathrm{d} q_{s}}{\mathrm{~d} t}+\frac{\partial \boldsymbol{r}_{i}}{\partial t}=\sum_{\alpha=1}^{s} \frac{\partial \boldsymbol{r}_{i}}{\partial q_{\alpha}} \frac{\mathrm{d} q_{\alpha}}{\mathrm{d} t}+\frac{\partial \boldsymbol{r}_{i}}{\partial t}=\sum_{\alpha=1}^{s} \frac{\partial \boldsymbol{r}_{i}}{\partial q_{\alpha}} \dot{q}_{\alpha}+\frac{\partial \boldsymbol{r}_{i}}{\partial t}$$于是体系在\( t\)时刻的总动能\(T\)可表示为$$T=\frac{1}{2} \sum_{i=1}^{N} m_{i}\left(\dot{\boldsymbol{r}}_{i}\right)^{2} \equiv T\left(q_{1}, q_{2}, \cdots, q_{s} ; \dot{q}_{1}, \dot{q}_{2}, \cdots, \dot{q}_{s} ; t\right)$$总动能一般是广义坐标、广义速度和时间的函数。
拉格朗日方程
主动力:非约束力,比如斜面上物体的重力\(G\),平行于斜面的推动物体沿斜面运动的力\(F\)。
约束力:以上面的斜面物体为例子,斜面所施加的支持力\(N\)和摩擦力\(f\)就是约束力。约束力其实也是约束反力,约束力在以前的教材中叫做约束反力,后来改成了约束力,所以约束力就是约束反力。在理论力学中,更多的说约束力。 在工程力学中,更多的说约束反力。 其实都是一个东西:约束(比如,支座)施加在物体(比如,结构)上的力。约束力(合力)的方向必与该约束对被约束的物体所能阻止的位移方向相反。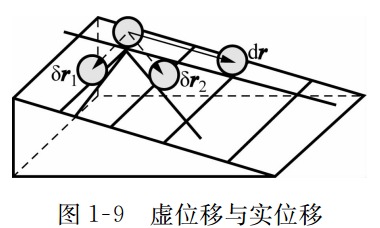
实际位移:力学中通常定义的位移。如果\(dt=0\),则\(\mathrm{d} \boldsymbol{r}=\mathbf{0}\)。对于\(N\)粒子体系,利用全微分的连锁规则,可得其任一组成粒子在\(t \rightarrow t+\mathrm{d} t\)时间内发生的位移为$$\mathrm{d} \boldsymbol{r}_{i}=\frac{\partial \boldsymbol{r}_{i}}{\partial q_{1}} \mathrm{~d} q_{1}+\frac{\partial \boldsymbol{r}_{i}}{\partial q_{2}} \mathrm{~d} q_{2}+\cdots+\frac{\partial \boldsymbol{r}_{i}}{\partial q_{s}} \mathrm{~d} q_{s}+\frac{\partial \boldsymbol{r}_{i}}{\partial t} \mathrm{~d} t, \quad i=1,2, \cdots, N ; \quad s \leqslant 3 N$$式中\(\frac{\partial \boldsymbol{r}_{i}}{\partial q_{\alpha}}=\frac{\partial x_{i}}{\partial q_{\alpha}} \boldsymbol{e}_{x}+\frac{\partial y_{i}}{\partial q_{\alpha}} \boldsymbol{e}_{y}+\frac{\partial z_{i}}{\partial q_{\alpha}} \boldsymbol{e}_{z}, \alpha=1,2, \cdots, s\) (注:广义速度、广义坐标和时间之间的独立关系看数的该章节)
虚位移:虚位移是不依赖时间的,在任意时刻都可能发生的,满足一切约束条件的位移。正如上图斜面的小球,可以沿着不同的方向发生位移。实际运动中发生的实际位移不过是满足约束条件的各个可能位移中的一个位移(这里斜面固定)。因此,如果找到一种方法或原则,根据这种方法或原则挑选出实际的运动,那么这种从体系满足约束条件的各种所有可能运动中挑出实际发生的运动的方法或原则就可作为力学的基本原理了。这正是拉格朗日建立的分析力学的基本思想。
准确地说,想象中粒子在\(t\)时刻的位置在满足所受约束的前提下无限小的可能变更,就叫作虚位移,记为\(\delta \boldsymbol{r}\),以示和实位移\(d \boldsymbol{r}\)的区别。从数学意义上来说,实位移和虚位移都意味着矢量\( \boldsymbol{r}\)的变化,但是与实位移不同,虚位移不是因时间改变而发生的位移,其对应的时间变更\(\delta t=0\)。我们这里的虚位移是与时刻相对应,它是体系在给定时刻的位置所能发生的满足约束条件的位置变化。
\(\boldsymbol{r}_{i}\left(q_{1}, q_{2}, \cdots, q_{s}, t\right)\)在\(t\)时刻的微分即为\(N\)个粒子体系中任一组成粒子在此刻的虚位移(注意\(\delta t=0\)):$$\delta \boldsymbol{r}_{i}=\frac{\partial \boldsymbol{r}_{i}}{\partial q_{1}} \delta q_{1}+\frac{\partial \boldsymbol{r}_{i}}{\partial q_{2}} \delta q_{2}+\cdots+\frac{\partial \boldsymbol{r}_{i}}{\partial q_{s}} \delta q_{s}, \quad i=1,2, \cdots, N ; \quad s \leqslant 3 N$$虚功:粒子在\(t\)时刻发生虚位移\(\delta \boldsymbol{r}\)的过程中,所受的力就是在\(t\)时刻的力,虚功为\(\delta W=\boldsymbol{F} \cdot \delta \boldsymbol{r}\)
理想约束:若作用于一个力学体系上的所有约束力在任意虚位移中所做的虚功之和为零,即:$$\sum_{i=1}^{N} \boldsymbol{R}_{i} \cdot \delta \boldsymbol{r}_{i}=0$$则此力学体系所受约束叫作理想约束,比如光滑面(支持力垂直于虚位移的运动方向)、光滑曲线、铰链、刚性杆、不可伸长的绳等。
基本形式的拉格朗日方程:
保守系的拉格朗日方程: