测不准原理
普遍不确定原理的证明
对任意可观测量\(A \) (i.e. \(\hat{A}\),下式中\( f \equiv(\hat{A}-\langle A\rangle) \Psi \))$$\sigma_{A}^{2}=\langle(\hat{A}-\langle A\rangle)^{2}\rangle=\langle \Psi |(\hat{A}-\langle A\rangle)^2 \Psi\rangle=\langle(\hat{A}-\langle A\rangle) \Psi |(\hat{A}-\langle A\rangle) \Psi\rangle=\langle f | f\rangle$$同理对任意可观测量\(B\)有\(\sigma_{B}^{2}=\langle g | g\rangle\),其中\( g \equiv(\hat{B}-\langle B\rangle) \Psi \)。
- \(\sigma_{A}^{2} \sigma_{B}^{2}=\langle f \mid f\rangle\langle g \mid g\rangle\)
- Schwarz不等式 \(\langle f \mid f\rangle\langle g \mid g\rangle \geq|\langle f \mid g\rangle|^{2}\)
- 对任意复数\(z\)有\(|z|^{2}=[\operatorname{Re}(z)]^{2}+[\operatorname{Im}(z)]^{2} \geq[\operatorname{Im}(z)]^{2}=\left[\displaystyle\frac{1}{2 i}\left(z-z^{*}\right)\right]^{2}\)
- 令\( z=\langle f | g\rangle\),有$$\sigma_{A}^{2} \sigma_{B}^{2}\geq|\langle f \mid g\rangle|^{2}\geq\left(\frac{1}{2 i}[\langle f \mid g\rangle-\langle g \mid f\rangle]\right)^{2}$$
下面计算\(\langle f \mid g\rangle\)的结果(注意下面的\(\langle A\rangle\)和\(\langle B\rangle \)表示的是纯数值,所以随便交换顺序都不影响)$$\begin{aligned} \langle f | g\rangle &=\langle(\hat{A}-\langle A\rangle) \Psi |(\hat{B}-\langle B\rangle) \Psi\rangle=\langle\Psi |(\hat{A}-\langle A\rangle)(\hat{B}-\langle B\rangle) \Psi\rangle \\ &=\langle\Psi |(\hat{A} \hat{B}-\hat{A}\langle B\rangle-\hat{B}\langle A\rangle+\langle A\rangle\langle B\rangle) \Psi\rangle \\ &=\langle\Psi | \hat{A} \hat{B} \Psi\rangle-\langle B\rangle\langle\Psi | \hat{A} \Psi\rangle-\langle A\rangle\langle\Psi | \hat{B} \Psi\rangle+\langle A\rangle\langle B\rangle\langle\Psi | \Psi\rangle \\ &=\langle\hat{A} \hat{B}\rangle-\langle B\rangle\langle A\rangle-\langle A\rangle\langle B\rangle+\langle A\rangle\langle B\rangle \\ &=\langle\hat{A} \hat{B}\rangle-\langle A\rangle\langle B\rangle \end{aligned}$$同理\( \langle g | f\rangle=\langle\hat{B} \hat{A}\rangle-\langle A\rangle\langle B\rangle \),于是$$\langle f | g\rangle-\langle g | f\rangle=\langle\hat{A} \hat{B}\rangle-\langle\hat{B} \hat{A}\rangle=\langle\hat{A} \hat{B}-\hat{B} \hat{A}\rangle=\langle[\hat{A}, \hat{B}]\rangle$$式中两个算符是对易关系\( [\hat{A}, \hat{B}] \equiv \hat{A} \hat{B}-\hat{B} \hat{A}\),于是$$\sigma_{A}^{2} \sigma_{B}^{2} \geq\left(\frac{1}{2 i}\langle[\hat{A}, \hat{B}]\rangle\right)^{2}$$这就是更普遍的测不准原理。位置和动量算符的对易关系\( [\hat{x}, \hat{p}]=i \hbar \),于是\(\sigma_{x}^{2} \sigma_{p}^{2} \geq\left(\displaystyle\frac{\hbar}{2}\right)^{2}\)
- 如果\( [\hat{A}, \hat{B}]=0\)(可对易),那么测就不存在测不准原理,\(A \)和\( B\)可以同时测得无限准,如\(\left[x, x^{2}\right]=0 \);
- commutator不等于零的时候,就会有测不准原理;
- 测不准原理本来说是,你观测\(A\),那么波函数就会坍塌到一个本征态(本征函数),量到的结果就是本征值,那么这次测量会对下次测量有影响(如果二者不对易);
- \(\hat{A}\) 和 \(\hat{B}\) 具有对易关系和它们具有相同的本征函数是等价的(想一下这个时候的测不准原理):
- 如果 \(\hat{A} \hat{B}-\hat{B} \hat{A}=0\) (即 \(\hat{A}\) 和 \(\hat{B}\) 具有对易关系),那么对任意函数\(f\)有\(\hat{A} \hat{B}|f\rangle=\hat{B}\hat{A}|f\rangle\)
- 有相同本征函数\( \left\{\begin{array}{l} \hat{A}\left|f_{n}\right\rangle=a_{n}\left|f_{n}\right\rangle \\ \hat{B}\left|f_{n}\right\rangle=b_{n}\left|f_{n}\right\rangle \end{array}\right. \)可推出\(\hat{A} \hat{B}\left|f_{n}\right\rangle=\hat{A} b_{n}\left|f_{n}\right\rangle=a_{n} b_{n}\left|f_{n}\right\rangle=\hat{B} \hat{A}\left|f_{n}\right\rangle\)
参考资料:
(1) 对于量子力学的不确定性原理,为什么会存在「算符不对易」与「傅里叶变换」两种解释?—知乎
(2) 不确定性原理的前世今生—博客园
能量-时间不确定原理
我们知道坐标-动量不确定原理 \(\Delta x \Delta p \geq \displaystyle\frac{\hbar}{2}\),而能量-时间不确定原理\(\Delta t \Delta E \geq \displaystyle\frac{\hbar}{2}\)实际上是一个完全不同的概念,虽然二者形式上看起来差不多。坐标、动量和能量都是动力学变量 — 是体系在任何时刻都可观测的特征。但是时间本身不是动力学变量:你不会像测量坐标和 能量一样去测量一个粒子的“时间”。时间是一个独立变量,动力学量是它的函数。
当测量一个体系变化有多快时,我们来求某个可观测量\(Q(x, p, t)\)的期望值对时间的导数$$ \frac{d}{d t}\langle Q\rangle=\frac{d}{d t}\langle\Psi \mid \hat{Q} \Psi\rangle=\left\langle\frac{\partial \Psi}{\partial t} \mid \hat{Q} \Psi\right\rangle+\left\langle\Psi \mid \frac{\partial \hat{Q}}{\partial t} \Psi\right\rangle+\left\langle\Psi \mid \hat{Q} \frac{\partial \Psi}{\partial t}\right\rangle $$由薛定谔方程\(i \hbar \displaystyle\frac{\partial \Psi}{\partial t}=\hat{H} \Psi\)所以$$ \frac{d}{d t}\langle Q\rangle=-\frac{1}{i \hbar}\langle\hat{H} \Psi \mid \hat{Q} \Psi\rangle+\frac{1}{i \hbar}\langle\Psi \mid \hat{Q} \hat{H} \Psi\rangle+\left\langle\frac{\partial \hat{Q}}{\partial t}\right\rangle $$\(\hat{H}\)是厄米算符,于是有\(\langle\hat{H} \Psi \mid \hat{Q} \Psi\rangle=\langle\Psi \mid \hat{H} \hat{Q} \Psi\rangle\),因此$$ \frac{d}{d t}\langle Q\rangle=\frac{i}{\hbar}\langle[\hat{H}, \hat{Q}]\rangle+\left\langle\frac{\partial \hat{Q}}{\partial t}\right\rangle $$根据广义不确定原理,并且如果我们这里\(\frac{\partial \hat{Q}}{\partial t}=0\),那么$$ \sigma_{H}^{2} \sigma_{Q}^{2} \geq\left(\frac{1}{2 i}\langle[\hat{H}, \hat{Q}]\rangle\right)^{2}=\left(\frac{1}{2 i} \frac{\hbar}{i} \frac{d\langle Q\rangle}{d t}\right)^{2}=\left(\frac{\hbar}{2}\right)^{2}\left(\frac{d\langle Q\rangle}{d t}\right)^{2} $$或者,更简洁地$$ \sigma_{H} \sigma_{Q} \geq \frac{\hbar}{2}\left|\frac{d\langle Q\rangle}{d t}\right| $$我们定义\(\Delta E \equiv \sigma_{H}\)以及\(\Delta t \equiv \displaystyle\frac{\sigma_{Q}}{|d\langle Q\rangle / d t|}\),则有$$ \Delta E \Delta t \geq \frac{\hbar}{2} $$
- \(\Delta t\)是 the amount of time it takes the system to change by one sort of standard deviation of the observable in question.
- \(\Delta t\)表示\(Q\) 的期望值变化单位标准差时所需的时间。
- 这里的\(\Delta t\)不是一次测量时间尺度上耗时的uncertainty;
- \(\Delta t\) for the system是没有意义的,有意义的是\(\Delta t\) for mementum/position/kinetic energy,即\(\Delta t\)完全依赖于你所关心的那个可观测量\(Q\)。
- 如果系统快速变化,使得我们感兴趣的可观测量\(Q\)也变化很快,即\(\displaystyle\frac{d}{d t}\langle Q\rangle\)很大,这意味着\(\Delta t\) would be small,这意味着uncertainty in the energy will be large。
- 如果系统快速变化,it has to consist of a superposition of a wide range of different energies。
- 这里的\(Q\)是任意可观测量,也就是说任意可观测量快速变化,那么能量的不确定性就会很小。换句话说,只要能量的不确定性很小(即we're dealing with sort of a determinate state with almost ),那么任意可观测量变化速率就会很小(\(\displaystyle\frac{d}{d t}\langle Q\rangle\)很小),极限情况就是我们之前说的stationary state (eigenstate of Hamiltonian operator),能量的不确定的为零,\(\Delta t\)为无限大。
狄拉克符号
三种方式表示波函数
从线性代数我们知道,要描述空间中的一个向量,可以按照不同的方式选取线性无关的基向量组。当然为了方便我们通常选取相互正交而且模长为\(1 \)的作为基向量组,即使这样,通过旋转,我们还是可以得到新的基向量组。形象比喻就是,为了表示一个中文叫作“狗”的东西,英文、法文、德文等都有自己对应的单词,我们虽然用的是不同的语言,但是描述的是同一个东西;我们虽然用的是不同的基向量组,但是都可以通过它们的线性组合来得到已知向量。
先前我们描述波函数空间,思路是先求解出某一时刻的波函数在各点\( x\)的状态,然后加上时间的相位因子,即可以描述波函数随着时间的演变,其实这就是我们说的【坐标空间波函数】。通过傅里叶变换,可以很容易将坐标空间波函数变成【动量空间波函数】,二者包含同等容量的信息。坐标空间当然比较容易想象,动量空间就比较抽象了;无论是用哪个空间来描述,波函数都是其中的本征函数的线性组合,当然本征值分立的情况比较容易理解,对于连续谱来说,单一本征函数不可归一化,但是无数本征函数(对应本征值连续)线性组合的波函数是可以归一化的。对于波函数来说,本征函数集,除了从坐标和动量的角度选取,还有很多其他的选取方式,下面开始详细介绍。
为了简单起见,这里我们不考虑时间的相位因子,即只讨论time-independent的情况,对于任意不含时的波函数(矢量)\(|\psi\rangle\),坐标、动量、能量等是动力学变量,我们只需要用任一动力学变量就可以描述这个波函数,或者说描述波函数的状态。选取不同的动力学变量,就是选取不同的基底(也是就是基矢量/本征函数),这里的基底也是动力学变量算符的本征函数,于是波函数可以描述为一组系数,这组系数对基矢量的线性组合的加和函数。
- 坐标空间,\(\hat{x}|x\rangle=x|x\rangle\),本征值\(x\),本征函数为\(|x\rangle=f_x(p)=\displaystyle\frac{e^{-\frac{i p x}{\hbar}}}{\sqrt{2 \pi \hbar}}\),算符\(\hat{x}=-\displaystyle\frac{\hbar}{i} \frac{d}{d p}\)$$ \psi(x)=\langle x \mid \psi\rangle $$注:\(\psi(x)=\displaystyle\int_{-\infty}^{\infty} \phi(p) \frac{e^{ \frac{ip x}{\hbar}}}{\sqrt{2 \pi \hbar}} d p=\int_{-\infty}^{\infty} \delta(x-\xi) \psi(\xi) d \xi\)
- 动量空间,\(\hat{p}|p\rangle=p|p\rangle\),本征值\(p\),本征函数为\(|p\rangle=f_p(x)=\displaystyle\frac{e^{\frac{i p x}{\hbar}}}{\sqrt{2 \pi \hbar}}\),算符\(\hat{p}=\displaystyle\frac{\hbar}{i} \frac{d}{d x}\)$$ \phi(p)=\langle p \mid \psi\rangle $$注:\(\phi(p)=\displaystyle\int_{-\infty}^{\infty} \frac{e^{-\frac{ip x}{\hbar}}}{\sqrt{2 \pi \hbar}} \psi(x) d x\)
- 能量空间,假设是分离谱,\(\hat{H}|\psi_n\rangle=E_{n}|\psi_n\rangle\),本征值\(E_{n}\),本征函数为\(|\psi_n\rangle\)。$$c_{n}=\left\langle\psi_{n} \mid \psi\right\rangle $$
- 总结:\(|\psi\rangle\)状态可以用\(\psi(x)\)、\(\phi(p)\)以及\(\left\{c_{n}\right\}\)等等来独立来表示。
算符的矩阵表示
厄米算符是一种线性变换,下面推导矩阵\( \hat{Q}\)的形式$$|\beta\rangle=\hat{Q}|\alpha\rangle$$现在我们以“标准正交”的\( \left\{\left|e_{n}\right\rangle\right\} \)作为基底,那么$$\begin{aligned} &|\alpha\rangle=\sum_{n} a_{n}\left|e_{n}\right\rangle, \quad a_{n}=\left\langle e_{n} \mid \alpha\right\rangle\\ &|\beta\rangle=\sum_{n} b_{n}\left|e_{n}\right\rangle, \quad b_{n}=\left\langle e_{n} \mid \beta\right\rangle \end{aligned} $$于是算符线性变换的方程可以表示为$$\sum_{n} b_{n}\left|e_{n}\right\rangle=\hat{Q}\sum_{n} a_{n}\left|e_{n}\right\rangle=\sum_{n} a_{n} \hat{Q}\left|e_{n}\right\rangle$$两边同时取\( \left|e_{m}\right\rangle\)的内积$$\sum_{n} b_{n}\left\langle e_{m} | e_{n}\right\rangle=\sum_{n} a_{n}\langle e_{m}|\widehat{Q}| e_{n}\rangle$$等式左侧\( \left\langle e_{m} | e_{n}\right\rangle\)其实就是\(\delta_{mn}\),于是左侧等于\(b_m\);等式右侧,令\( \langle e_{m}|\hat{Q}| e_{n}\rangle=Q_{m n}\),将右侧进行改写,因此最后等式改写为$$b_{m}=\sum_{n} Q_{m n} a_{n}$$ 矩阵\(Q_{m n}\)就是observable operator \(\hat{Q}\)的矩阵。\(\hat{Q} | e_{n} \)就是挑出矩阵的第\(n \)列,而\( \left\langle e_{m}|\hat{Q}| e_{n}\right\rangle \)就是挑出第\( n \)列的,第\( m \)行的单一元素\(Q_{m n} \)。我们暂时讨论的是离散的,后面再说连续的情况。不同的基底会有不同的observable operator/linear transformation MATRIX
矩阵\(Q_{m n}\)就是observable operator \(\hat{Q}\)的矩阵。\(\hat{Q} | e_{n} \)就是挑出矩阵的第\(n \)列,而\( \left\langle e_{m}|\hat{Q}| e_{n}\right\rangle \)就是挑出第\( n \)列的,第\( m \)行的单一元素\(Q_{m n} \)。我们暂时讨论的是离散的,后面再说连续的情况。不同的基底会有不同的observable operator/linear transformation MATRIX
投影算符(projection Operator)
线性代数中的投影矩阵参考线性代数-1笔记。
我们已经知道\(\langle\alpha | \alpha\rangle \)是内积,结果是一个数,那么\(|\alpha\rangle\langle\alpha|\)是什么的呢?我们可以让它作用在一个向量(右矢,也是函数),看看结果是什么,类似放一个测试函数\(|\beta\rangle\),然后就可以看出它真正的作用是什么了。事实上\( \hat{P} \equiv|\alpha\rangle\langle\alpha|\)为【投影矩阵】(也是projection operator),作用于\(|\beta\rangle\),得到的是沿着\(|\alpha\rangle\)向量方向的一个新的向量,也就是说\(|\beta\rangle\)在\(|\alpha\rangle\)方向的投影向量为\(\langle\alpha | \beta\rangle|\alpha\rangle\)。$$\hat{P}|\beta\rangle=|\alpha\rangle\langle\alpha | \beta\rangle=\langle\alpha | \beta\rangle|\alpha\rangle$$
如果\( \left\{\left|e_{n}\right\rangle\right\} \)是分立的标准正交基组合(基底,描述一个空间),那么\(\left|e_{n}\right\rangle\left\langle e_{n}\right|\)也会是projection operator,同样地,我们将其作用在测试向量\(|\alpha\rangle\)上,注意\(|\alpha\rangle=\displaystyle\sum_{n}a_n|e_{n}\rangle\),于是可以得到(\(n\)是特定的,\(m\)是变化的,以示区分)$$|e_{n}\rangle\langle e_{n} | \alpha\rangle =|e_{n}\rangle\langle e_{n} | \displaystyle\sum_{m}a_m|e_{m}\rangle=a_n|e_n\rangle$$如果将所有的投影矩阵(\( |e_{n}\rangle\langle e_{n} |\)不同的\( n\)值)都作用在测试函数上(任意选取),然后加和有$$\sum_{n}\left|e_{n}\right\rangle\left\langle e_{n} | \alpha\right\rangle= \sum_{n} a_{n}\left|e_{n}\right\rangle=|\alpha\rangle$$因此\( \displaystyle\sum_{n}\left|e_{n}\right\rangle\left\langle e_{n}\right|=1 \)(注:严格来说应该等于单位阵),这说明这是一个完整的基底,即所有基底对应的projection operator做summation等于\( 1\)。
类似的,假如\( \left\{\left|e_{z}\right\rangle\right\} \)是狄拉克正交归一的连续基(连续谱),那么$$\left\langle e_{z} | e_{z^{\prime}}\right\rangle=\delta\left(z-z^{\prime}\right)$$则有\( \displaystyle\int\left|e_{z}\right\rangle\left\langle e_{z}\right| d z=1\)。所以$$ \begin{aligned} &\Rightarrow \int\left|e_{z}\right\rangle\left\langle e_{z} \mid \alpha\right\rangle d z \\ &=\int c_{z}\left|e_{z}\right\rangle d z \\ &=|\alpha\rangle \end{aligned} $$
Two level system振荡(解耦)
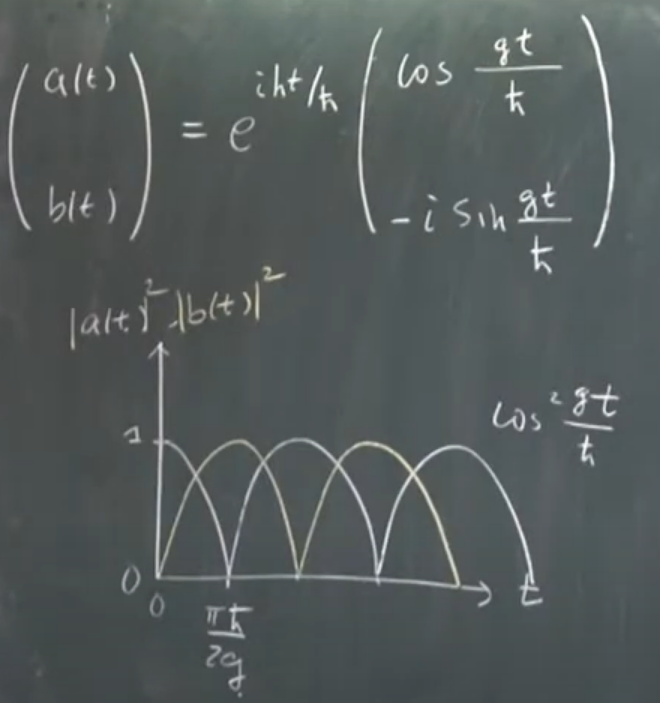 系统在两个状态之间变换,或者说“振荡”。提出这个的初衷是为了解决微中子振荡的问题。
系统在两个状态之间变换,或者说“振荡”。提出这个的初衷是为了解决微中子振荡的问题。谐振子的矩阵解释
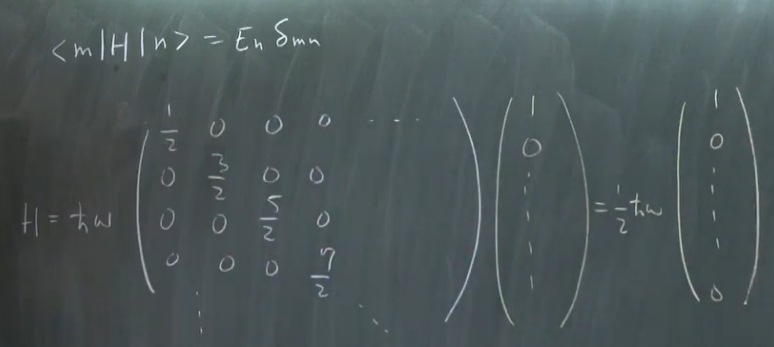 上式表示哈密顿量作用在基态,提取出该态下的能量。
上式表示哈密顿量作用在基态,提取出该态下的能量。